ACC(車間距離制御装置)の車間距離検知方法

ACCとは
ACC(Adaptive Cruise Control/アダプティブ・クルーズ・コントロール)の機能やオススメ理由を解説します。
前を走るクルマの検知方法
それでは、ACCはどのようにして、車間距離を一定に保つのでしょうか? 大きく2つのタイプがあります。
まず「ミリ波レーダー」です。車の先端、グリルの部分に搭載した「ミリ波レーダー」と呼ばれるセンサーによって、前を走る車までの距離などを計測します。ACC作動時は、ミリ波レーダーセンサーからの要求に応じて、車は自動的にアクセルを踏み込み、減速が必要な場合は自動的に緩いブレーキがかけられます。このアクセル操作やブレーキ操作までの一連の流れがACCの行っている制御の概要です。
ミリ波レーダーセンサーの特徴は、雨や霧などの悪天候下や夜間でも影響を受けにくい点です。また、前を走行するクルマとの距離、相対速度、角度に関する情報に加えて、前走車に対して自車が近づいているのか、それとも離れているのかといった変化を瞬時に認識する能力に優れています。また、ミリ波は照射距離が200m前後と長いため、より高い車速にまで対応することも可能です。
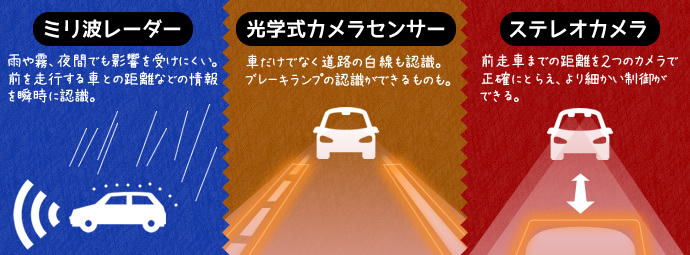
もうひとつが「光学式カメラセンサー」です。光学式カメラセンサーの特徴は、カメラが映した情報をそのままデジタル化することができるため、車だけでなく道路の白線も認識できることです。最新の光学式カメラセンサーの中には、画像がカラー化されたものもあり、赤く点灯する前車のブレーキランプを認識することで、より素早い減速操作が可能になりました。また、光学式カメラを左右に2つ並べて搭載した「ステレオカメラ」では人と同じ両眼立体視ができるため、対象物を立体的に把握することができます。そのため、光学式カメラを1つだけ搭載する「単眼カメラ」に比べてきめ細やかな制御が期待できます。
一部の車種には、ミリ波レーダーセンサーと光学式カメラセンサーの両方のセンサーを使っているモデルもあります。